眼科手术新突破:国产手术机器人引领精准医疗新时代
发布时间:2025-03-18 10:14:38 | 来源:中国网 | 作者: | 责任编辑:吴一凡在全球推动医疗科技创新的背景下,国家加大支持力度,未来高端医疗设备自主研发和国产化替代受到鼓励。眼科手术机器人集成高精度运动控制、全景三维成像与导航等核心技术,团队跨学科协作实现手术器械微米级精准操作等,为眼科手术带来变革,开启智能化、精准化新篇章。徐州医科大学的眼疾玻除团队抓住市场需求,潜心研发一款创新型眼科手术机器人。
踔厉奋发,青春共筑人类福祉
团队建立以来秉持着踔厉奋发、守正创新的宗旨,研发一款创新型眼科手术机器人,融合了高精度运动控制、全景三维成像与导航、智能人机交互和实时监测反馈等核心技术,成功攻克了传统眼科手术的诸多难题。
在技术层面,其操作精度达到 0.01毫米,远超行业平均水平,极大降低了手术创伤和并发症发生率。全景三维成像导航系统可构建 360度无死角的立体手术视野,病灶发现率大幅提升,手术残留率显著降低。智能人机协作模式支持多种交互方式,降低了医生学习门槛,缩短了手术时间。全流程风险预警机制则进一步保障了手术的安全性与可控性。
临床应用成果斐然。在北京同仁医院,使用该机器人进行复杂视网膜脱离手术,手术时间缩短 25%,术后复发率从 8%降至 1.5%,患者术后 6个月视力恢复率提升至 92%。在基层医院,通过“远程手术指导平台 +标准化操作模块”,河北省某基层医院年手术量从 50例增至 150例,手术成功率与患者满意度显著提升。
这款眼科手术机器人不仅提升了医疗服务质量,改善了医疗环境,还促进了医疗资源均衡分配,助力分级诊疗推行。同时,它带动了上下游产业发展,创造了大量就业岗位,为眼科医疗事业的发展注入了新动力,有望成为全球眼科微创手术领域的技术标杆。
众志成城,团结铸就技术突破
在研究新型手术机器人的过程中,团队成员以无间的默契与深厚的信任铸就了坚实的合作基石。来自不同学科背景的成员如同一支精密运转的齿轮组,技术研发的严谨理性与创意设计的灵动想象交织碰撞,市场调研的务实视角与策略规划的全局思维相辅相成,共同勾勒出项目的完整图景。备赛过程中,每一次深夜实验室的灯火通明、每一轮线上线下交织的头脑风暴、每一份反复打磨的方案草稿,都凝聚着团队的汗水与智慧。面对技术瓶颈的焦灼与赛程压力的考验,成员们始终以包容与理解彼此支撑,用真诚的沟通化解分歧,用共同的信念跨越障碍。
团队由3名资深指导教师和15名核心学生成员组成,成员专业背景涵盖信息工程、临床医学、金融等多个领域,学科交叉性强,具备强大的综合创新能力。指导教师均为各自领域的专家,拥有丰富的科研与教学经验。吕海英教授凭借深厚的生命科学专业知识,为项目提供生物学原理、人体眼部生理结构等方面的理论支持。董玉成副教授为机器人的运动控制算法、图像识别算法等提供数学模型构建与优化支持,确保机器人在手术操作中的高精度定位和精准控制。马玉花教授负责机器人的材料选择与研发,确保机器人的机械部件具备良好的生物相容性和耐用性。
团队成员各司其职,分工明确。杨佳怡同学负责利用其信息技术能力,参与手术机器人智能人机交互界面的设计与优化,提升医生操作的便捷性和舒适性。李长城同学负责借助 AutoCAD绘制机器人机械结构图纸,为机器人的设计与优化提供技术支持。张佳欣同学负责参与全景三维成像与导航技术的研发工作,协助优化手术区域的成像效果。曹佳丽在团队中负责从临床医学角度对手术机器人的功能进行评估和优化。周宣君同学负责机器人手术过程中的麻醉管理优化方案,确保患者在手术过程中的安全与舒适。丁雨萌主要负责项目的文档整理与管理工作。张诗晋负责项目的财务管理和市场分析工作。张菁同学在团队中负责财务核算与成本控制工作,准确记录项目的各项收支。韦乃心同学负责项目的市场推广策划和国际合作事务。孙晓婷同学负责项目的运营管理工作,运用工商管理知识,优化项目流程,提高团队协作效率。郭欣同学在团队中负责项目的宣传推广和客户关系维护工作。孙源雪同学从儿科医学视角出发,为手术机器人在儿童眼科手术中的应用提供专业建议,尹甜嘧同学负责项目的部分技术研发工作,运用新能源领域的创新思维,探索手术机器人在能源供应和节能方面的优化方案,过海英同学负责手术机器人相关的医学检验技术研究工作。
由于市场应用方面经验不足,团队请到了徐春明(南京德毅治电子商务有限公司监事)作为企业顾问,给予了项目市场渠道方面的大力支持,耐心指导本项目完成市场化落地。
迎难而上,创新彰显青年力量
在认真分析市场痛点的基础上,团队的成果有五大突破:
创新技术1:引入前沿的微纳驱动技术,搭配多传感器融合系统,极大程度上提升了机械臂的操作精度。这一突破为复杂眼科手术的精准施行创造了条件,能够显著降低手术风险,提高手术成功率。
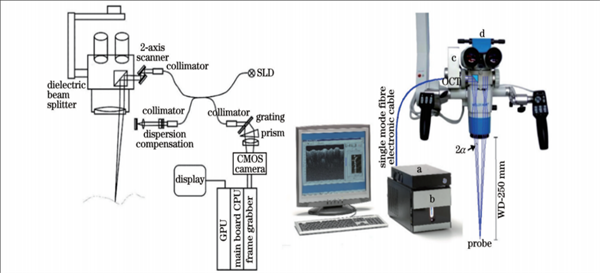
创新技术2:通过集成OCT(光学相干断层扫描)与荧光造影技术,成功研发出全景三维成像模块。借助该模块,可实时获取手术区域的全景三维图像,为医生提供全方位、高分辨率的视觉支撑,助力手术操作变得更为精准、高效。
创新技术3:精心设计并开发出手势识别与语音控制功能,实现了人机之间的自然交互。这一功能大幅降低了机械臂的操作难度,有效缩短了操作人员的学习周期。
创新技术4:运用多种高精度传感器搭建实时监测反馈系统,能够对手术过程中的关键参数展开实时监测。一旦参数出现异常,便会及时提醒医生,以便医生迅速调整手术策略,全方位保障手术安全。
勇往直前,奋力谱写时代华章
在未来,团队的眼科手术机器人将以纳米级的操作精准度,突破人类手工操作极限,以求让每一台手术都能更安全、更高效。目前,团队将聚焦于玻璃体切割术机器人的量产与商业化中,并将白内障、青光眼等术式加入未来拓展计划中。团队将以构建“影像诊断-手术规划-机器人执行-术后随访”的一体化眼科智能诊疗平台为长期目标,为此进行不断的奋斗。凭借不断的技术突破,助力医疗资源合理分配,推动全球眼科手术水平迈向新高度,让病患对光明渴求不再受限,是团队的美好愿景。(新疆师范大学、周婧雯)